





3D

Robotic Joint Design (2 Stage Planetary Gear Reduction)


This self-initiated mechanical design project involved the development of a compact robotic joint actuator designed to reduce a 3000 RPM BLDC motor input speed to a target output speed of approximately 60 RPM through a custom two-stage planetary gearbox.
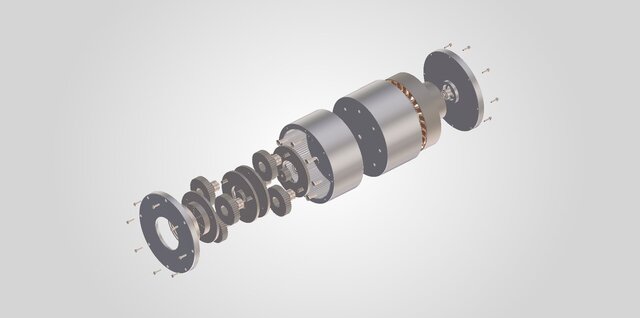
The gearbox was designed to achieve an overall reduction ratio of 49:1 while maintaining a compact form factor suitable for robotic applications. The complete assembly was modelled in SolidWorks and includes custom-designed planetary gears, ring gears, carriers, shafts, bearings, fasteners, housing components, and BLDC motor integration.
The project focused on mechanical power transmission, gearbox packaging, component integration, and manufacturable assembly design. Particular attention was given to bearing support, shaft alignment, gear placement, assembly methodology, and overall mechanical robustness.
Key Features:
• 49:1 two-stage planetary gearbox
• Input speed: 3000 RPM
• Output speed: approximately 60 RPM
• Custom-designed gears and transmission components
• Integrated bearing and shaft support system
• BLDC motor integration
• Fully detailed CAD assembly
• Design for Manufacture (DFM) considerations
Skills Demonstrated:
• Mechanical Design
• Gear Design and Power Transmission
• Robotics Engineering
• SolidWorks CAD Modelling
• Mechanical Assembly Design
• Design for Manufacture (DFM)
• Engineering Documentation
Published