










RC Offroad Car (ESP32 & SolidWorks)

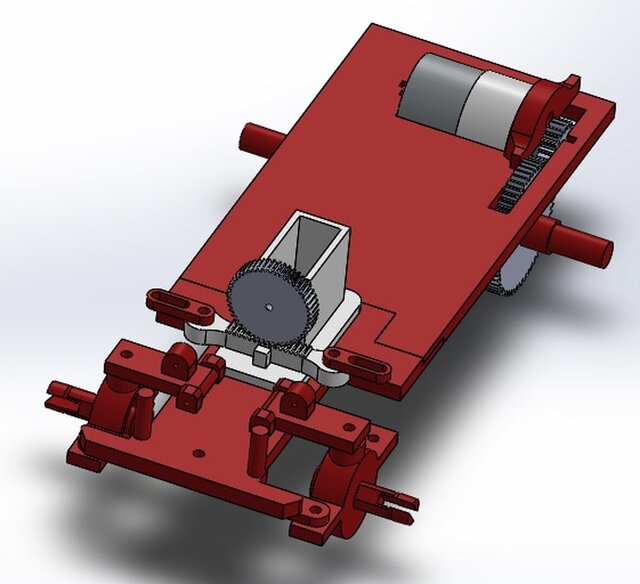
This project is a custom-designed RC off-road car built using ESP32 microcontrollers and a SolidWorks-designed chassis. The vehicle uses a 12V DC drill motor for movement and a 9g servo motor for steering, both driven by a logic-isolated motor driver circuit with level shifters.
For power management, the car includes an LM7805 regulator to safely power the ESP32, a 3S Li-ion battery pack with BMS protection, and a robust wiring setup for reliability. Communication between the controller and the vehicle is established via the ESP-NOW protocol, offering a stable range of up to 150 meters under normal conditions.
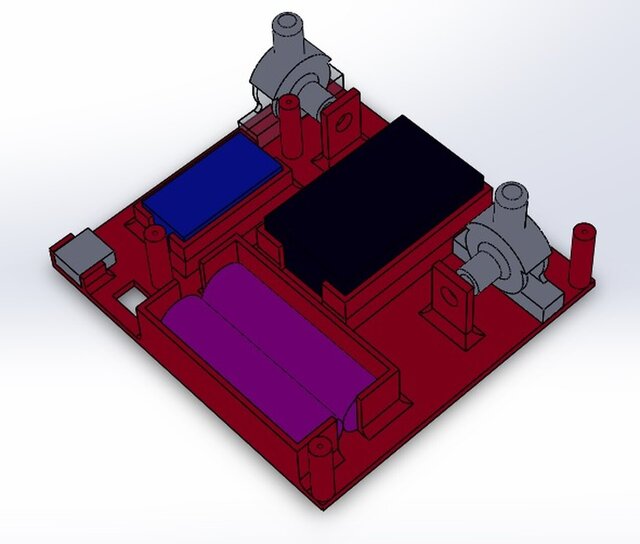
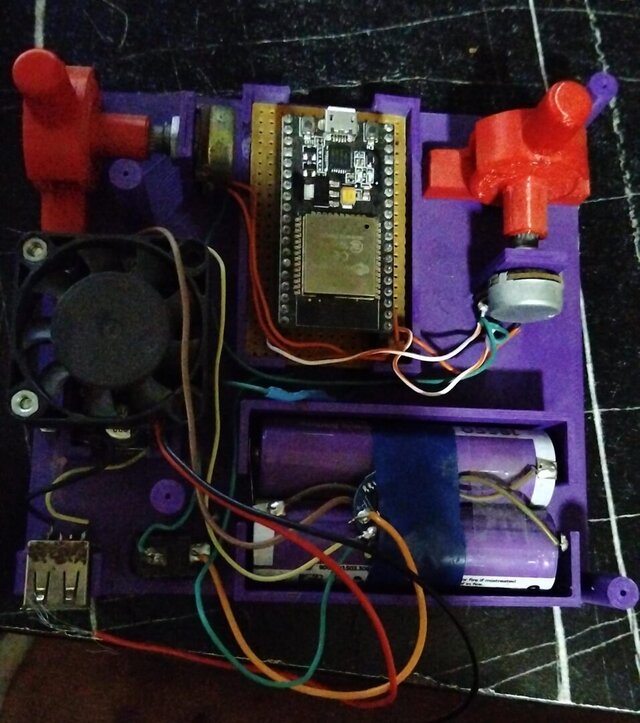
The remote controller is powered by a 2S Li-ion battery pack with BMS and a voltage converter, along with a dedicated charging circuit featuring current control. Analog joystick input is captured using dual 10k potentiometers and transmitted to the vehicle via ESP32. A small cooling fan ensures stable operation of the power electronics.
This project demonstrates a complete integration of electronics, embedded systems, and mechanical design, making it a reliable prototype for custom RC applications.
Files (10)
License:
CC - Attribution
Learn more