







Spider Robot

jgoytiav
 Top Designer
Top Designer
Top Designer

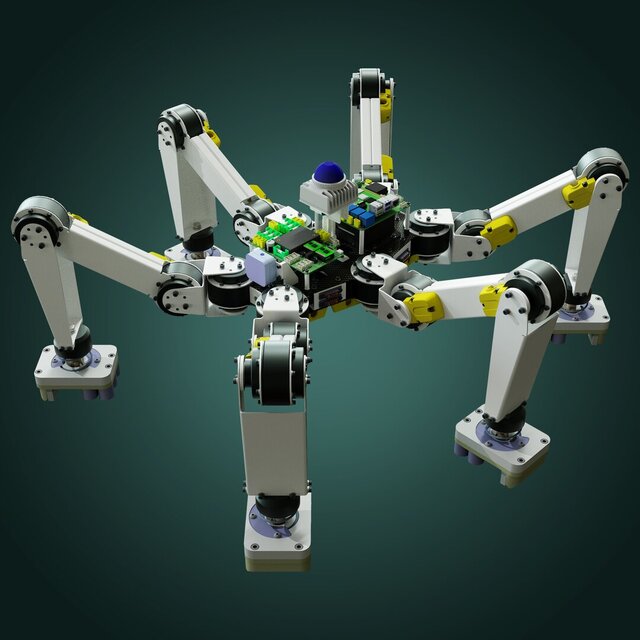
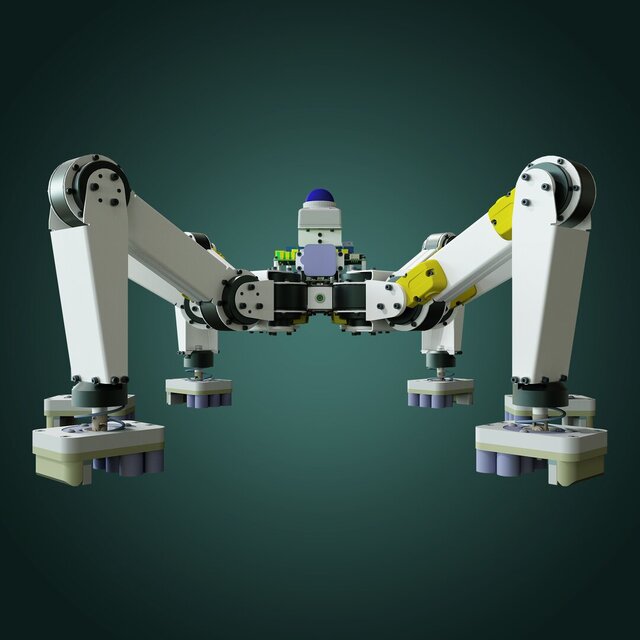
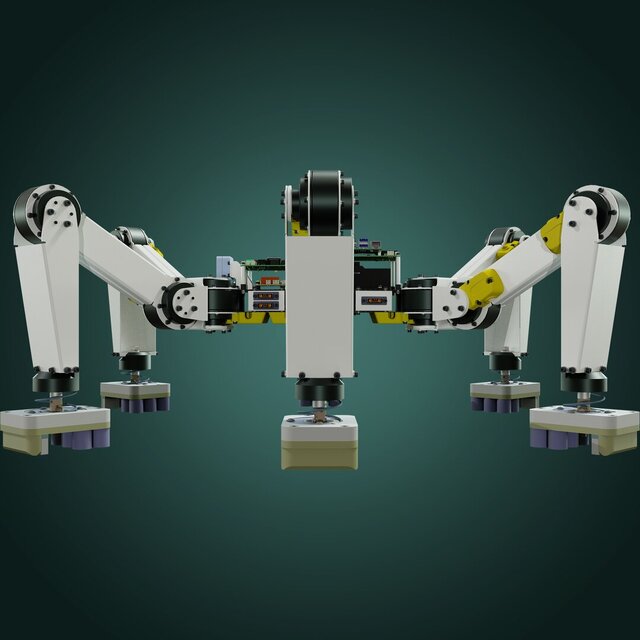
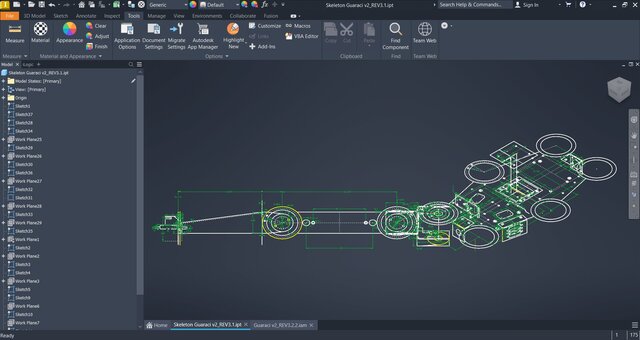
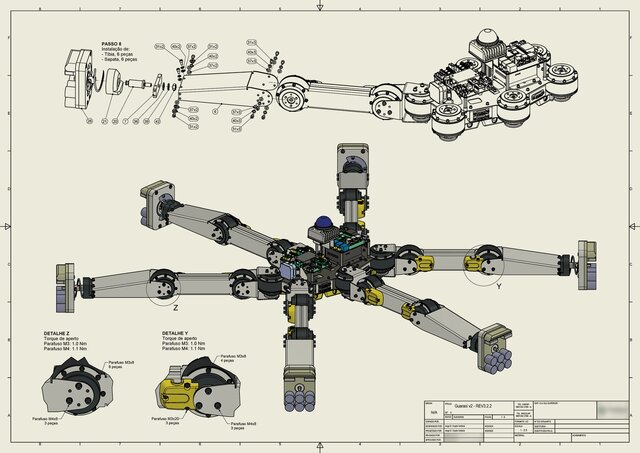
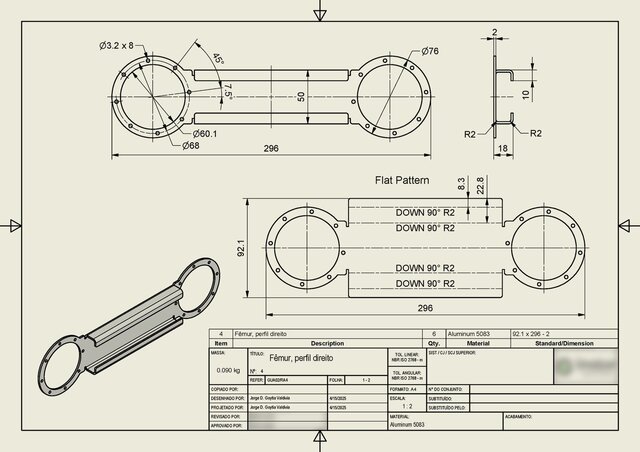
The Spider Robot is an electronic inspection device designed to detect defects and aging in metallic plate structures, developed using the Skeleton Design methodology in Autodesk Inventor. This approach utilizes multiple base sketches distributed across different planes within a master part file, serving as the foundational geometry for all components and sub-assemblies throughout the model. The robot features six articulated legs, each with two joints: one between the body and femur, and another between femur and tibia, enabling stable locomotion over complex surfaces. Magnetic feet allow secure adhesion to steel structures, including vertical or inverted planes. This configuration enables precise movement and close-range inspection, making the robot ideal for monitoring corrosion, cracks, and structural degradation in industrial environments. The parametric workflow ensures design consistency and facilitates modifications across all structural elements.
Published