
Scara robot

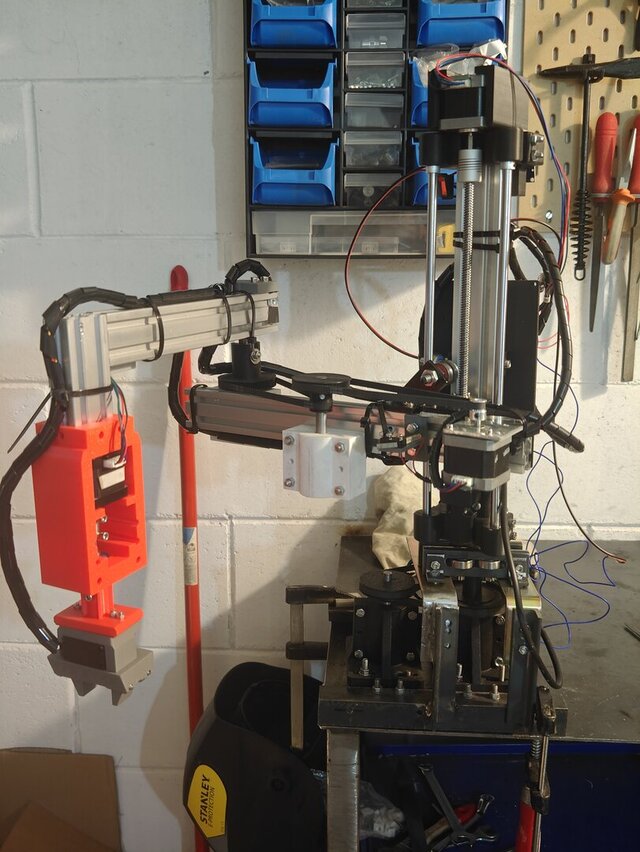
This SCARA robot was entirely designed and built as a personal project, with a strong focus on cost optimization and resourcefulness. Most mechanical and electronic components were salvaged from a disassembled Anet A8 3D printer, including the motherboard and power supply unit, repurposed for motion control.
The mechanical structure combines:
Aluminum extrusion profiles for the main frame
3D printed parts for joints, brackets, and custom fittings
Turned shafts machined on a lathe for precise rotating joints
Custom inverse kinematics software was developed from scratch, enabling the robot to reach a defined point in space and perform pick operations autonomously.
Published
in
Engineering