






Robotic Welding Cell for Variable Sheet Metal Parts


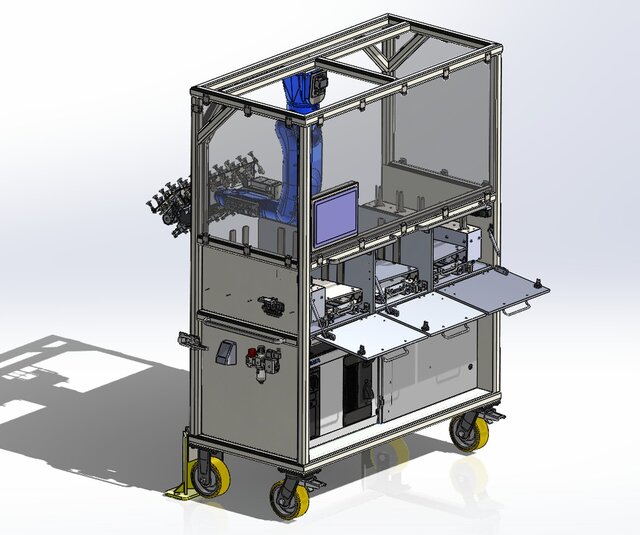
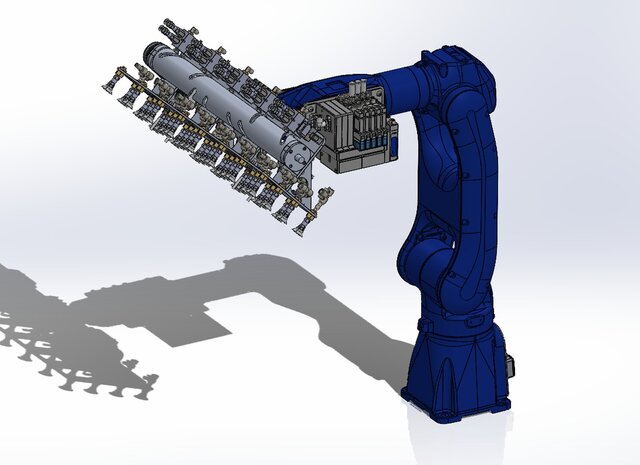
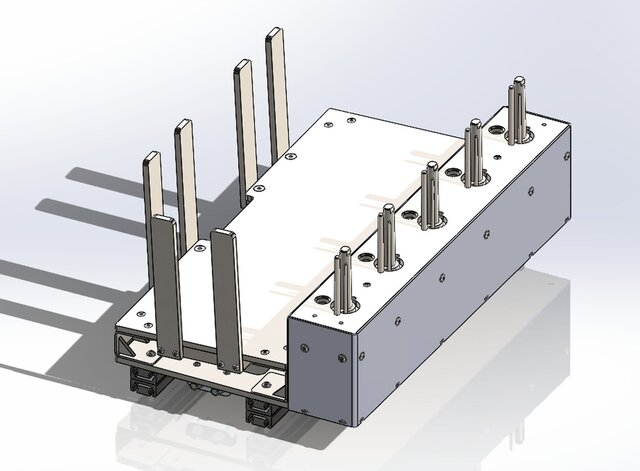
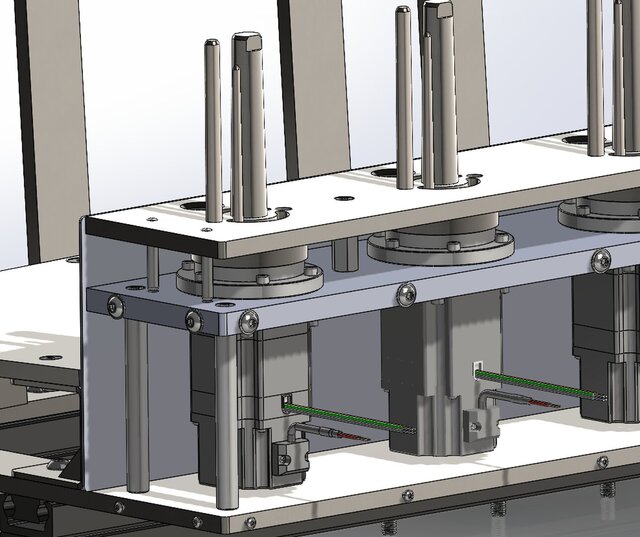
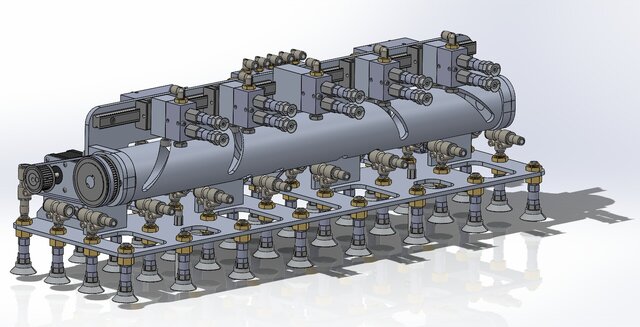
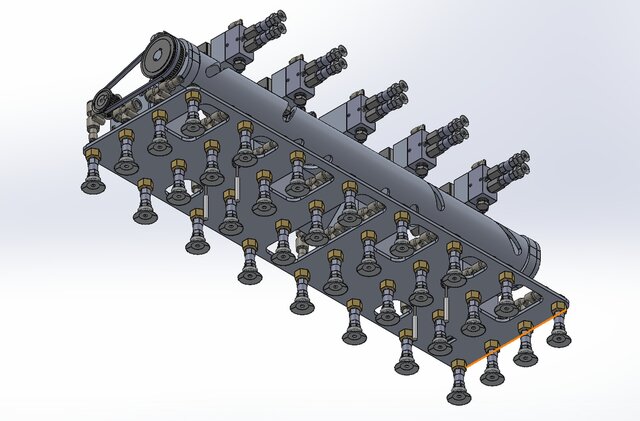
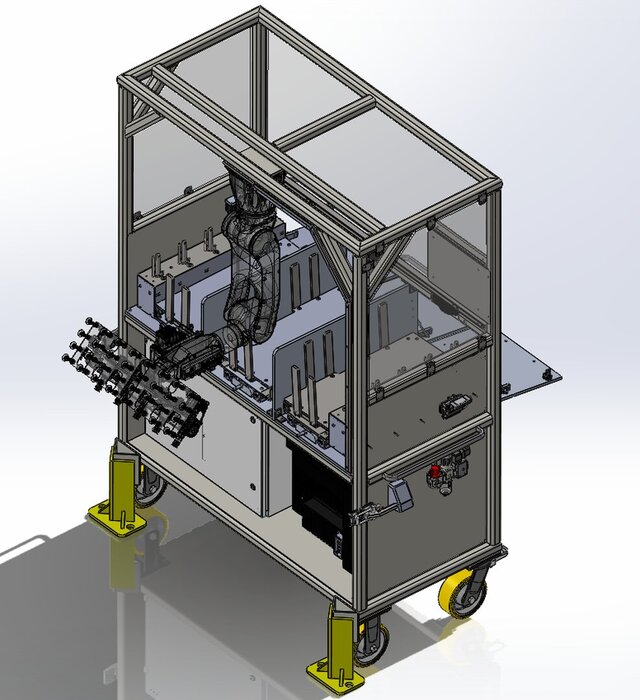
I designed a compact robotic automation cell to load sheet metal plates and multiple pucks with varying sizes, spacing, and orientations into a welding machine. The system was constrained to a 30" × 62" footprint, could be rolled out for manual operation, and allowed operators to preload parts while the robot was running. A custom multi-face gripper, rigid mobile frame with repeatable locating, and integrated safety systems enabled reliable handling across multiple SKUs while improving throughput and reducing manual handling.