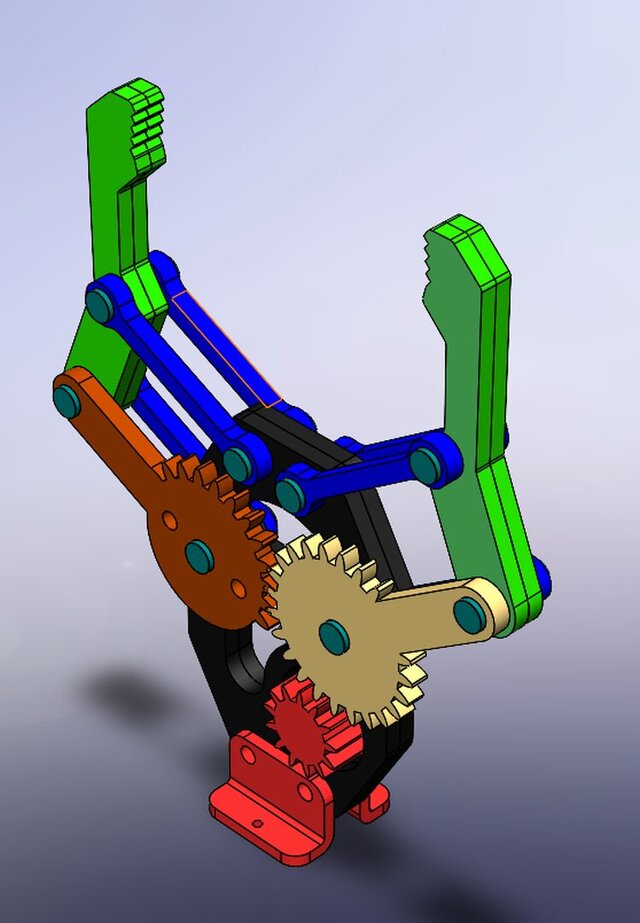









Robotic Gear-Driven Gripper Assembly


This mechanical assembly showcases a gear-driven robotic gripper mechanism designed for synchronized motion and precise actuation. The model features:
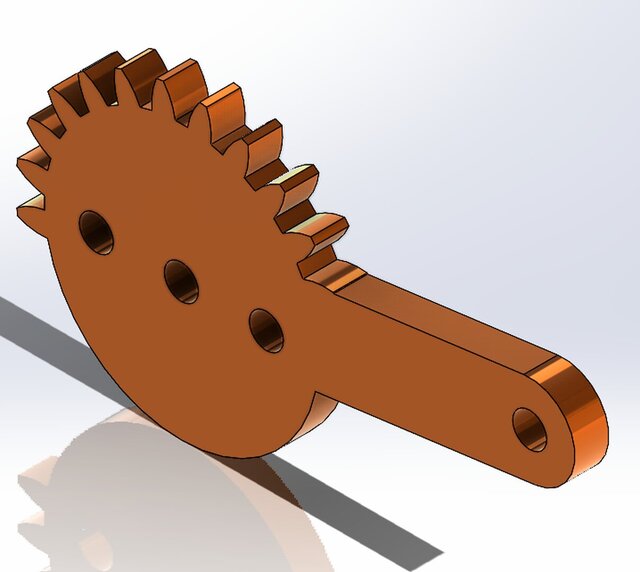
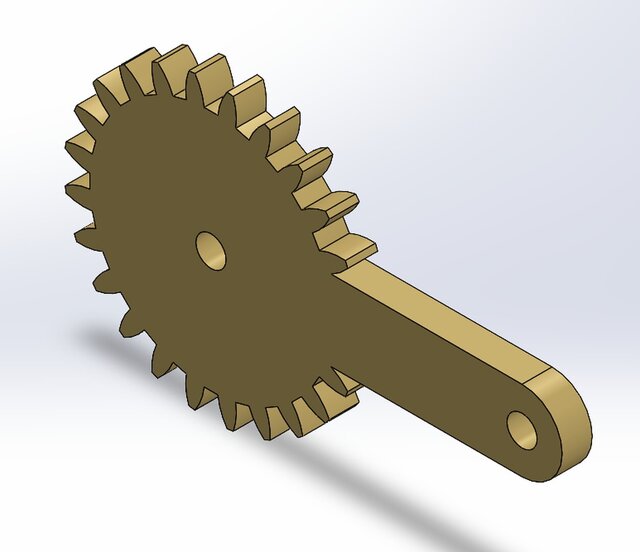
- Interlocking spur gears for coordinated movement
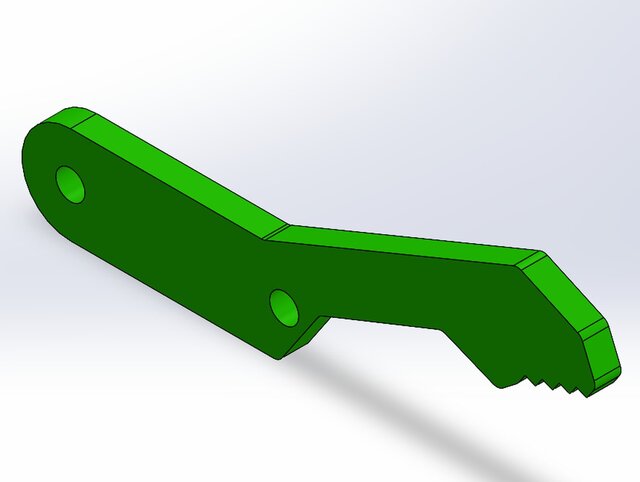
- Dual toothed arms for gripping or actuation
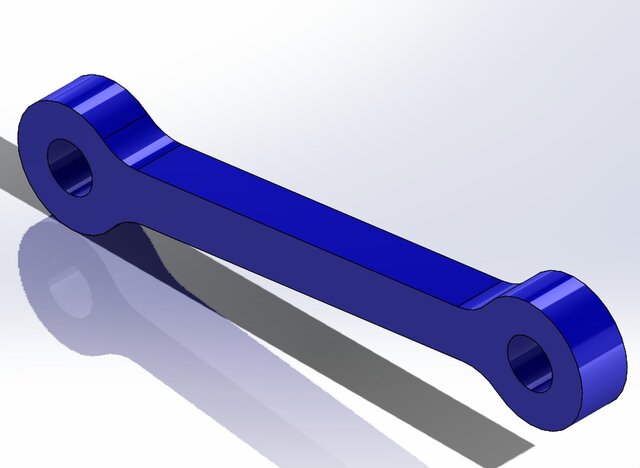
- Linkages and supports for stability and control
- Ideal for automation, robotics, and mechanical simulation projects
Designed in SOLIDWORKS with attention to manufacturability and motion analysis