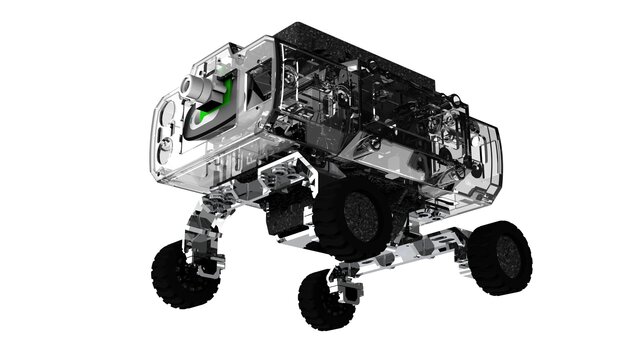



Modular All-Terrain Rover Chassis with Transparent Enclosure


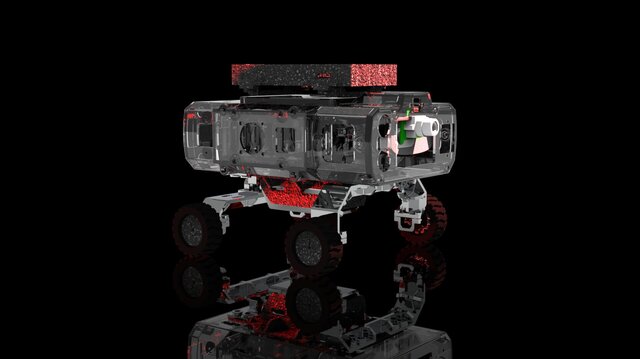
This project showcases the design and development of a compact all-terrain robotic rover chassis with a focus on modularity, structural integrity, and component visibility. The model features a transparent outer enclosure, allowing clear visualization of internal mechanical and electronic components, making it suitable for both educational demonstration and conceptual prototyping.
The chassis is designed with a four-wheel independent suspension system, enabling stable movement across uneven terrain. Special attention has been given to weight distribution and ground clearance to enhance mobility and performance in off-road conditions.
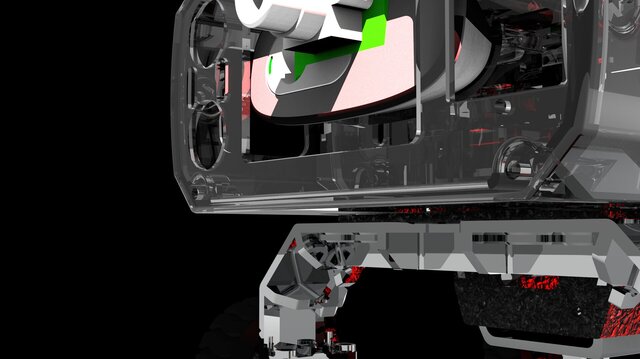
The internal layout is optimized to accommodate motors, control systems, and sensor modules, while maintaining ease of assembly and maintenance. The design follows a modular approach, allowing individual components to be replaced or upgraded without affecting the overall system.
This model was created using CAD tools with emphasis on precision, realistic assembly structure, and manufacturability considerations. It reflects practical engineering design thinking applied to robotic mobility systems.