

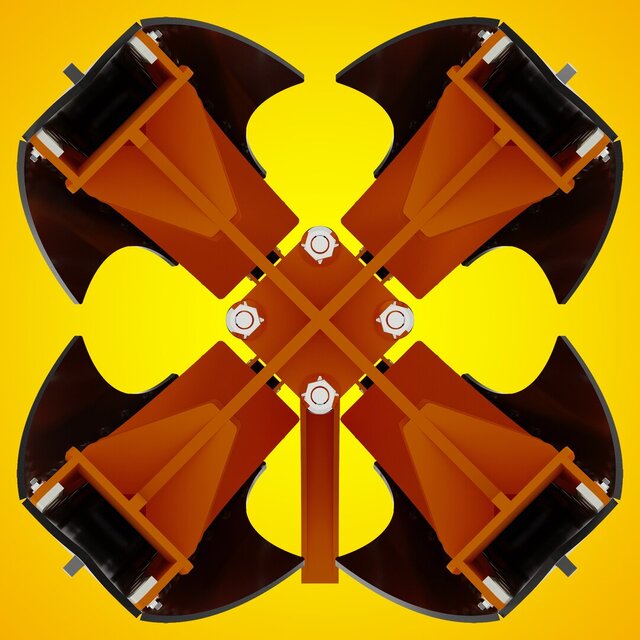




Hydraulic Four-Spade Claw

jgoytiav
 Top Designer
Top Designer
Top Designer

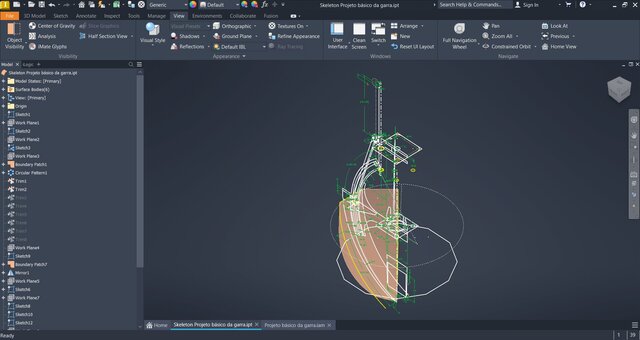
The Hydraulic Four-Spade Claw is a digging mechanism designed to create semi-spherical holes in soil, developed using the Skeleton Design methodology in Autodesk Inventor. This approach utilizes multiple base sketches distributed across different planes within a master part file, serving as the foundational geometry for all components and sub-assemblies throughout the model. The mechanism consists of four curved blades symmetrically arranged around a central axis and linked to a pneumatic cylinder. When actuated, the cylinder drives the blades outward in a coordinated motion, allowing them to penetrate and displace earth evenly. As the blades open, they carve a rounded cavity with near hemispherical shape. This design is ideal for planting, anchoring, or soil sampling applications requiring uniform hole geometry and efficient operation. The parametric workflow ensures design consistency and facilitates modifications across all structural elements.
Published