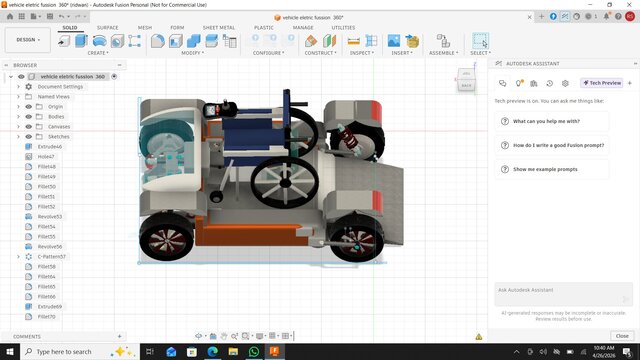

Fusion 360 engineering concept for ultra-compact outdoor wheelchair platform vehicle


The Ultra Compact Electric Wheelchair Platform is a purpose-built mobility solution designed to enable seamless integration between a standard manual wheelchair and a compact electric drive system. The platform allows users to independently access and operate the vehicle through a rear-entry ramp system, ensuring ease of use in both indoor and outdoor environments.
The design is constrained within a 750 mm width and 1200 mm length, making it suitable for tight spaces such as supermarkets, sidewalks, and urban pathways, while still maintaining stability and structural strength for outdoor terrain.
The system is powered by a dual 72V battery architecture, delivering sufficient torque and efficiency for real-world usage under full load conditions. Propulsion is achieved through dual rear hub motors (3-phase), providing balanced power distribution and improved traction.
To enhance ride quality and durability, the platform incorporates a fully integrated suspension system (front independent coil spring + rear support), allowing it to handle uneven surfaces such as gravel, ramps, and minor obstacles. The vehicle uses 300 mm all-terrain off-road tires with 6-spoke rims, optimized for grip and stability.
A key feature of the design is the docking and locking mechanism, which secures the wheelchair onto the platform using a dual-pin locking system actuated by a central linear actuator. This ensures the wheelchair remains stable during motion, preventing unwanted movement in all directions while allowing controlled release when needed.
The platform includes a rear ramp system (5° slope), optimized for safe entry and exit. The ramp is operated via a motorized mechanism and can be controlled remotely.
The electrical system is housed a sealed IP65-rated enclosure, containing the DC motor controller, cooling fan, wireless module, and display interface. Power distribution follows a structured architecture (battery → fuse → controller), ensuring safety and reliability.
User interaction is managed through a wireless remote and joystick interface, featuring:
On/Off control
Emergency stop function
Ramp open/close control
Integrated display for system feedback
Joystick braking function (downward press activates brake)
Additional safety systems include regenerative and mechanical braking, emergency cut-off, and stable center-of-gravity design through optimized battery placement.
Overall, this project represents a compact, modular, and engineering-driven mobility platform, bridging accessibility, safety, and real-world usability, while maintaining a strong foundation for further development toward production-ready implementation.