










FPV-drone-with-propellers


10-inch FPV Edge-AI Flight Platform
Project Overview
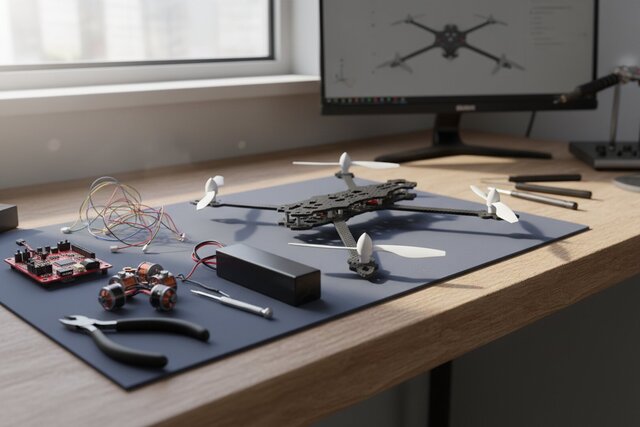
The objective was to engineer a custom electronics tray and an extended top plate to house a complex stack of Edge-AI and flight control hardware. The design accommodates an AVerMedia D131 AI module, a Pixhawk 6X flight controller, and a high-output Hobbywing ESC, all while maintaining strict propeller clearance and structural integrity for high-vibration environments.
Technical Specifications & Features
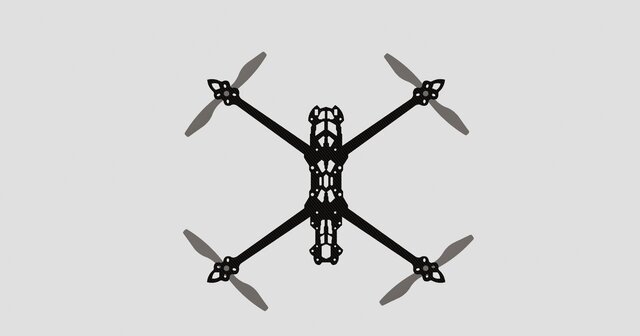
Parasolid-Engineered Geometry: Modeled using the Shapr3D Parasolid kernel to ensure 1:1 compatibility with SolidWorks 2024 and industrial CNC manufacturing standards.
Aerodynamic Shrouding: Integrated low-profile "side skirts" to eliminate the parasitic drag typically associated with standoff-mounted electronics.
Thermal Management: Incorporates passive cooling ducts that utilize propeller downwash to force airflow across the AI module's heatsink, preventing thermal throttling during intensive processing tasks.
EMI & RF Optimization: Designed with specific cable routing channels for u.FL pigtails and dedicated M3 antenna bosses to ensure maximum signal clarity for the M.2 WiFi 6 modules.
Vibration Isolation: Features specialized recesses for TPU damping, protecting the sensitive IMUs of the Pixhawk 6X from motor-induced resonance—a skill honed during the development of my UR10 robot adapter projects.
Design Methodology
Datum-Fixed Modeling: The design was built around the 6 original M3 arm-mounting holes as a "fixed datum" reference, ensuring a perfect 100% bolt-on fit without modifying the original frame.
Dynamic Clearance Validation: Performed a CAD sweep analysis using 9x4.5 tri-blade propellers to guarantee a minimum safety buffer during aggressive flight maneuvers.
Industrial Deliverables: Provided STEP 214 master files and Xometry-ready STLs with a 0.02 mm deviation tolerance for high-resolution 3D printing.
Published