

Drone Flight Controller Interconnect & Shield System


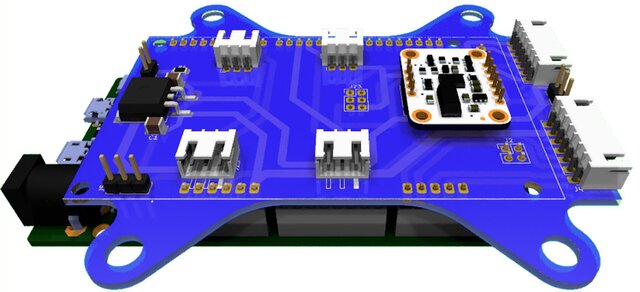
Designed a custom PCB ecosystem to centralize and manage communications for an Arduino Due-based flight controller. These boards eliminate "spaghetti wiring," improving signal integrity and mechanical reliability for high-vibration drone environments.
Microcontroller: Integrated Arduino Due via high-density female headers.
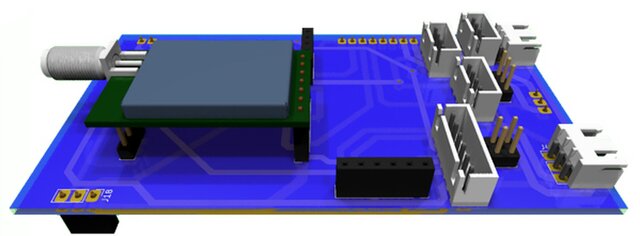
Sensor Suite: * I2C Bus: Centralized routing for IMU and Altimeter.
UART: Dedicated channel for LIDAR long-range altitude sensing.
Propulsion Interface: 4x ESC (Electronic Speed Controller) communication ports with optimized ground returns.
Telemetry: Dual wireless module support for redundant data links.
Form Factor: Custom mechanical footprint designed to fit specific drone chassis mounting points.
Published