





Desk Robotic Arm


I have designed a fully parametric 3D model of a robotic arm using SolidWorks. The completed work includes the following key deliverables and design features:
Complete Assembly Model:
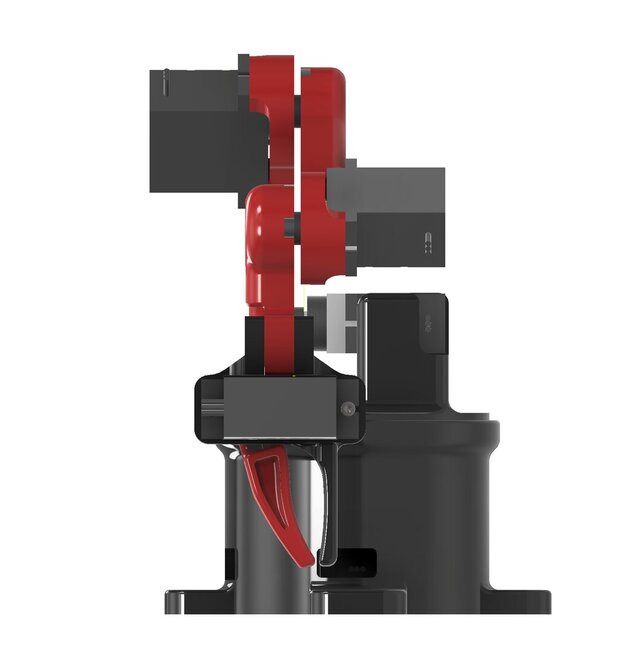
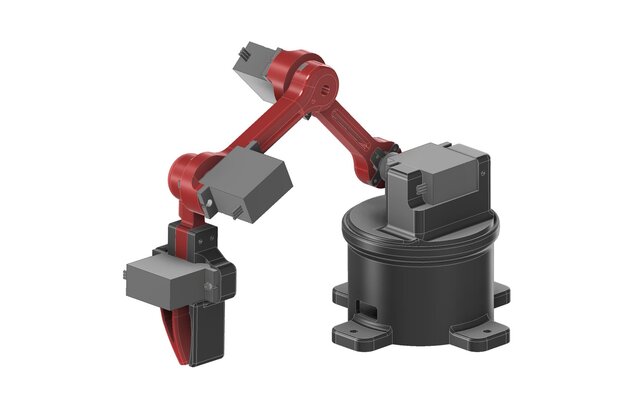
A multi-axis robotic arm assembly (e.g., 4‑DOF or 5‑DOF, specify if you have a fixed number) with all mechanical components assembled in a single SolidWorks assembly file.
Individual Part Files:
Every component of the arm (base, shoulder, elbow, forearm, wrist, end‑effector, links, fasteners, etc.) modeled as separate SolidWorks part files with accurate dimensions and tolerances.
Motion Study / Range of Motion:
A basic motion analysis or mate configurations showing the rotational and translational limits of each joint, verifying no interference between parts.
Detailed Drawings (optional – include only if true):
2D engineering drawings with dimensions, tolerances, and bill of materials (BOM) for manufacturing or assembly reference.
File Format Compatibility:
Source files saved in SolidWorks (specify version, e.g., 2022 or later). Exported neutral formats (STEP, IGES, STL, or Parasolid) also available upon request for use in other CAD or simulation software.
Documentation:
A short PDF guide explaining the assembly sequence, mate definitions, and how to modify key parameters (e.g., link lengths, servo mounting points).
All files are organized, named logically, and ready for your review or further modification as needed.
Published