
Bipedal Robot Kit Design

jay_khanderao
 Top Designer
Top Designer
Top Designer

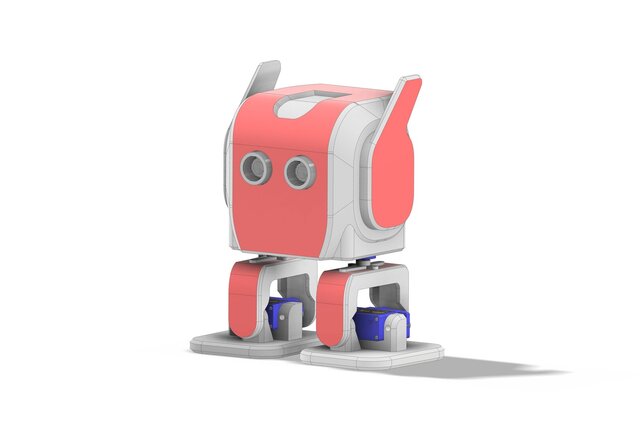
I designed and developed a fully 3D-printable Otto bipedal robot kit for educational and research purposes. The goal was to create a cost-effective, easy-to-assemble platform to teach robotics, electronics, and coding.
The project involved CAD modeling of the robot’s frame, servo integration, and optimizing parts for FDM 3D printing using Fusion 360.
Challenges included achieving balance and minimizing weight while maintaining durability. The final design successfully provided stable walking motion and easy customization for students and hobbyists