






Autonomous Ground Robot — Wildlife Detection System (PCB + Embedded AI)


Full-stack engineering project: an autonomous 4WD ground robot designed to patrol forested terrain and detect carcasses for early disease-surveillance reporting, addressing a real gap in current detection methods (foot patrols, drones, and trained dogs all face significant coverage, cost, or scalability limitations).
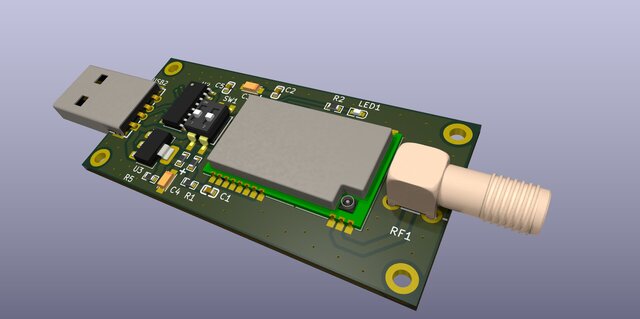
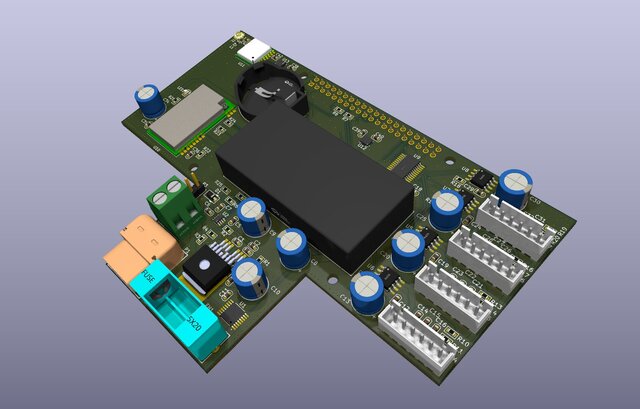
Designed and built the complete system independently, two custom PCBs (a robot control board integrating GPS, LoRa radio, IMU, magnetometer, PWM expander, four H-bridge motor drivers, and power monitoring on a single board; a matching ground-station radio board), the mechanical platform and 3D-printed enclosure (IP65-equivalent weatherproofing), and the full software stack.
Software includes a 4-process real-time architecture on Raspberry Pi 5 with zero-copy shared-memory IPC, VIO-first position estimation (Visual-Inertial Odometry with soft GPS correction, achieving 2.5% measured drift), an MPPI trajectory controller (512 sampled trajectories per cycle, 20 Hz), Dijkstra-based global path planning, and a custom YOLO object-detection model trained on a self-collected dataset, running on a Hailo-8L edge AI accelerator (86.5% mAP50, ~37.5 FPS). Robot-to-ground communication runs on a custom 5-layer binary protocol over LoRa, achieving ~6x bandwidth savings over JSON. Includes a web-based ground control panel for mission planning and live telemetry, and a Gazebo/ROS2 simulation environment.
Files (8)
License:
CC - Attribution - Non-Commercial - No Derivatives
Learn more
Published