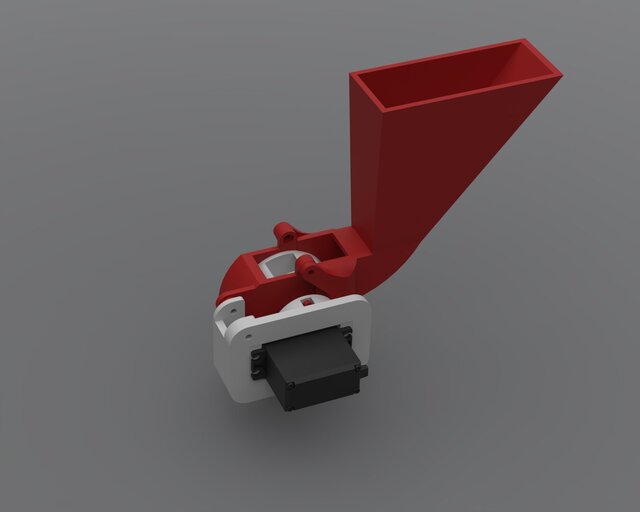

3D-Printed Seed Dispensing Mechanism

Designed and developed a seed dispensing mechanism for an autonomous seeding robot, powered by a servo motor for precise control. The housing and components were specifically optimized for 3D printing, ensuring low-cost and rapid prototyping. After fabrication, the dispenser was tested and validated, proving to be highly effective and reliable in controlled planting operations. This project demonstrates the integration of mechanical design, mechatronics, and practical testing to create functional agricultural robotics solutions.
Published